Scientific Knowledge
发布时间:2021-08-06 作者:上海工业控制安全创新科技有限公司 点击次数:次
预期功能安全(SOTIF)是在自动驾驶技术发展的大背景下出现的,是自动驾驶从L2到L3跨越的必然需求。随着自动驾驶技术的发展,人们发现车辆安全问题并非都源于系统错误和失效。在复杂的系统以及场景中,问题时常源于环境影响带来的非预期性安全问题。国内外科研机构和汽车厂商都在加速对汽车关键系统预期功能安全问题的研究。
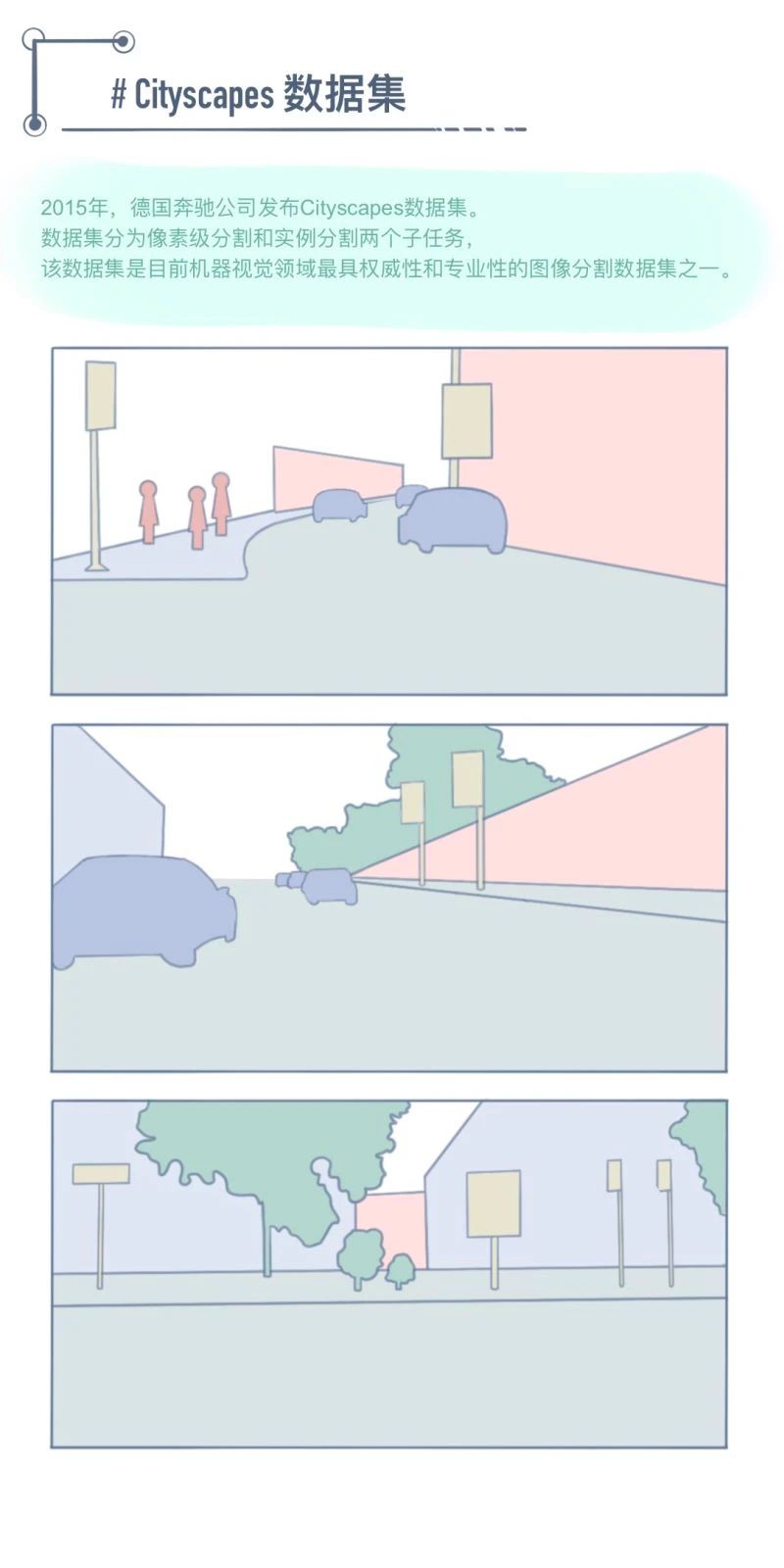
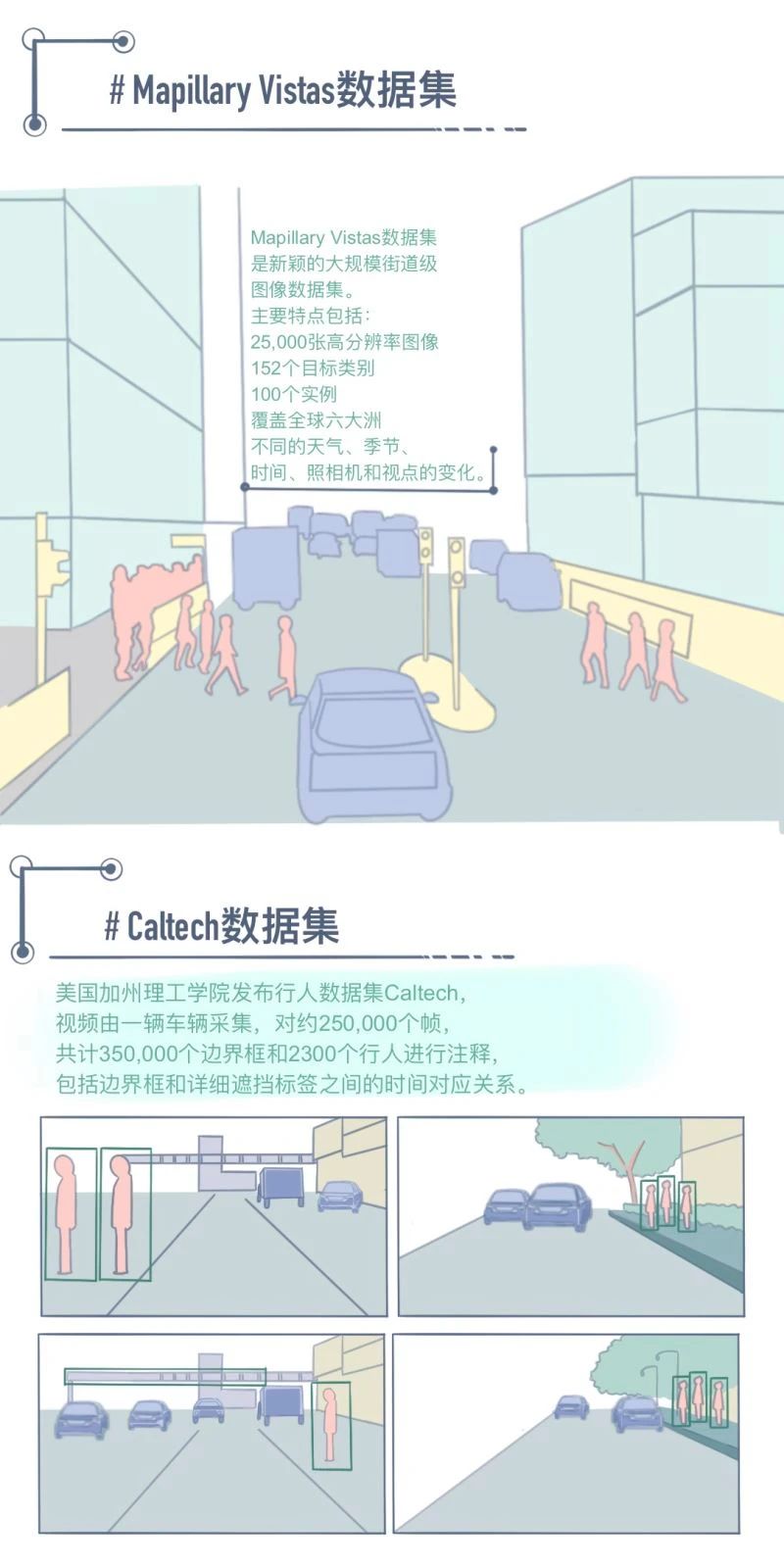
智能网联汽车在实际商业化运行之前,需要对其安全性能进行充分验证。随着自动驾驶的“场景化”趋势愈发明显,场景库对于测试、验证自动驾驶汽车的安全性至关重要。采用路测来优化自动驾驶算法耗费的时间与成本太高。根据美国兰德公司的研究,自动驾驶算法想要达到人类驾驶员水平至少需要累计177 亿公里的驾驶数据来完善算法。
特别致谢:智能网联汽车预期功能安全工作组《智能网联汽车预期功能安全前沿技术研究报告》撰写团队!
上一篇:无
下一篇:自动驾驶预期功能安全(三)